
Ransac
前言:
基于特征的图像匹配中会存在误匹配对,因此为提高匹配率,在粗匹配的基础上实现精匹配,可采用下面两种方法:RANSAC 算法和最小二乘法
一、RANSAC简介
RANSAC(RANdom SAmple Consensus随机采样一致性算法),是在一组含有“外点”的数据中,不断迭代,最终正确估计出最优参数模型的算法。
主要解决样本中的外点问题,最多可处理50%的外点情况。
内点:符合最优参数模型的点。
外点:不符合最优参数模型的点,一般指的数据中的噪声或无效点,比如说匹配中的误匹配对和估计曲线中的离群点。
外点检测算法
应用:在计算机视觉的匹配问题中广泛应用,以寻找最佳的匹配模型,达到去除误匹配对,实现精匹配的效果。
二、RANSAC基本思想
1.步骤
1. 在样本N中随机采样K个点
2. 对这K个点进行模型拟合
3. 计算其他点到该拟合模型的距离,并设置阈值,若大于阈值,为外点,则舍弃,小于阈值,为内点,统计内点个数。阈值:为经验值,由具体应用和数据集决定。
4. 然后以新的内点为基础,再次进行步骤2,得到新的拟合模型,迭代M次,选择内点数最多的模型,此时的模型为最优模型。
5. 也可以在此基础上,选择出内点数最多的模型,然后对它进行重新估计,估计的时候可以采用最小二乘法来拟合。
2.迭代次数的公式
1、n数据中内点所占的比例(内点的概率p):
2、选取的K个点至少有一个是外点的概率:

3、因此就能得到迭代M次的情况下,选取点都是外点的概率,进而得到迭代M次中,至少有一次选取点k个点都是内点的概率,也就是正确模型的概率:z一般要求满足大于95%即可。
4、最终得到迭代次数M:
M = log(1-z)/log(1-p^k )
三、最小二乘法
1、最小二乘法的主要思想
通过确定未知参数(通常是一个参数矩阵),来使得真实值和预测值的误差(也称残差)平方和最小,其计算公式为
其中 yi是真实值,yi^是对应的预测值。
下图中,红色为数据点,蓝色为最小二乘法求得的最佳解,绿色即为误差
图中有四个数据点分别为:(1, 6), (2, 5), (3, 7), (4, 10)。显然,最佳解(3, 7)
四、RANSAC 与 Least Squares Fit(最小二乘法)区别
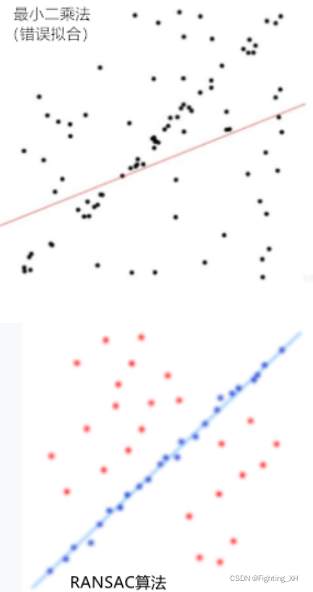
RANSAC算法:适用于含有较大的噪声或无效点的情况
最小二乘法:适用于误差比较小的情况
如下图所示,在误差比较大的情况下,肉眼也能看出拟合出的直线,但用最小二乘法拟合的直线却是错误的。而用RANSAC算法却能成功拟合。
五、RANSAC 算法的优缺点
优点:当数据中有大量的异常数据时,也能高精度的进行估计拟合。
缺点:对于异常数据超过50%的时候,拟合效果不佳。需要设置特定于问题的阈值。迭代次数若受到限制,那么达到迭代次数时拟合出来的模型可能并不是最佳模型。特定数据只能拟合出一个模型,一般多模型拟合采用霍夫变换。
六、Opencv实现RANSAC算法
1 | //RANSAC算法 |
